


Brief description
In order to manage the corona crisis, as well as the anticipated "new normal," it is essential to minimize the risk of infection from infected individuals and thereby reduce the number of new infections. Contact infections, caused by touching contaminated surfaces, represent a mode of transmission that is typically controlled by extensive cleaning or disinfection measures.
Common practice is currently wipe disinfection or disinfectant cleaning by cleaning professionals. However, the desirability of regular disinfection - ideally several times a day - is limited due to the large number of potentially contaminated surfaces. Moreover, cleaning agents or disinfectants are often applied in excess without concrete feedback on the associated disinfection performance. Excessively applied disinfectants can also damage surfaces or even cause dangerous side effects for humans, e.g. by attacking the skin or mucous membranes.
The approach of protecting people from infection by separating them spatially can also only be implemented to a limited extent. In many cases, such separation is not even possible. The above-mentioned cleaning process is an example of this, where cleaning staff move around the entire building and themselves become a risk of spreading germs. The risk is similarly high in the logistics environment, for example in hospitals, where logistics staff transport goods over long distances.
Mobile service robots can counteract these dangers by helping to minimize the walking distances of people and the associated direct or indirect risk of infection. Cleaning service providers in particular require solutions that, in addition to reducing walking distances, also help them to carry out disinfection tasks in a targeted, resource-saving manner and without endangering people.
In the project, various cleaning and disinfection tools for mobile robots were developed in cooperation with several Fraunhofer Institutes and evaluated with regard to their practical suitability, disinfection effect and duration of the disinfection process.
Project goals
Classical mercury-containing UV radiation sources are conceivably unsuitable for mobile applications due to the risk of glass breakage. In addition, a ban in future applications has already been decided due to the Minamata Convention of the United Nations. UVC LEDs will therefore dominate the market for disinfection applications in the future.
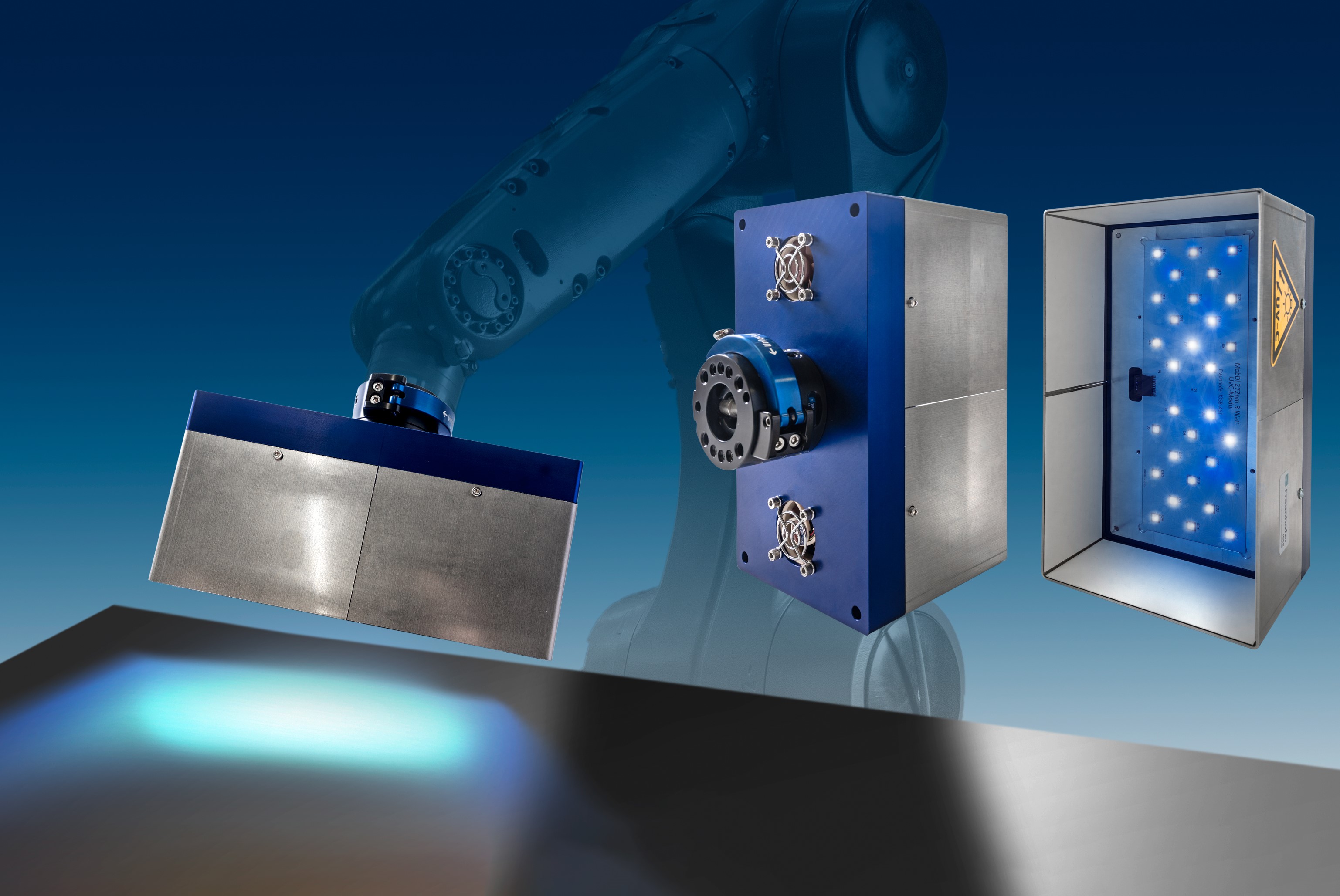
In the project, Fraunhofer IOSB-AST, as the leading competence center for UV LED applications within the Fraunhofer Gesellschaft, developed several LED-based radiation sources that can be operated as a tool on the service robot. As an application area, the disinfection of door handles and light switches was in the foreground of the developments here. However, based on the experience gained in previous projects, UVC LED modules for the disinfection of railings and handrails could also be further developed. The focus of the developments was always on the premise of enabling disinfection in the presence of people. Particularly with regard to radiation protection, this required special design measures. The non-production of ozone by the UVC LEDs used for disinfection and the speed of the disinfection process itself make UV irradiation the method of choice for surface disinfection.
Project result
UVC LEDs enable the emission of much more efficient wavelengths, which achieve a better disinfection effect at a significantly lower irradiation dose than is the case with classic low-pressure mercury or plasma lamps. In the project it could be shown that with modern UVC-LEDs in a technically optimized application a safe, complete and validatable disinfection can be achieved in an extremely short time. Compared to other disinfection processes such as plasma disinfection, combined processes of excimer UV and plasma or dry steam, UVC LED disinfection is orders of magnitude more efficient. Thus, energy and, above all, time can be saved.
